





バッファおよびドライバーICは、信号の保護、駆動強度の向上、電子回路の負荷制御に使用されます。バッファは主に信号の絶縁、ファンアウト、信号の完全性を向上させ、ドライバーはリレー、LED、MOSFET、モーター、長線、通信線に対してより高い電流または電圧を供給します。本記事では、バッファICとドライバーICの比較、その種類、用途、差動通信用途、選択要因を比較します。

バッファ/ドライバーとは何か?
バッファ/ドライバーは、信号をシステムの一部から別の部分へ転送するための電子回路であり、ソース回路を弱体化、遅延、過負荷にすることなく行われます。これは、信号が長いPCBトレース、ケーブル、バス、または複数の接続されたデバイスを通過する際に信号の整合性を維持するのに役立ちます。
バッファーは主に回路の段間を隔離し、負荷の影響を軽減します。ドライバーは信号の電流や電圧の容量を増加させ、低消費電力制御回路がより大きな負荷、高速な負荷、LED、リレー、MOSFET、モーター、通信回線を駆動できるようにします。バッファとドライバは機能が異なりますが、多くのICは両方の機能を1つのデバイスに統合しています。
例えば、マイコンのピンはモーターやリレー、長い信号線を直接駆動してはいけません。ドライバーやバッファは電気負荷を処理しつつ、コントローラーを保護し信号を安定させます。
| アイテム | バッファ | ドライバー |
|---|---|---|
| 主な目的 | 信号品質を分離し保持する | 電流または電圧駆動能力の向上 |
| 典型的な負荷 | 論理入力、バス、クロックライン | MOSFETゲート、LED、リレー、モーター、長いケーブル |
| 出力強度 | 中庸 | より高く |
| 主な懸念事項 | 読み込み、ファンアウト、信号の完全性 | 電流、熱、スイッチング速度、保護 |
| 一般的な例 | 74HC125、74HC244、SN74LVCシリーズ | ULN2003、MOSFETドライバー、RS-485ドライバー、モータードライバー |
バッファ/ドライバーの仕組み
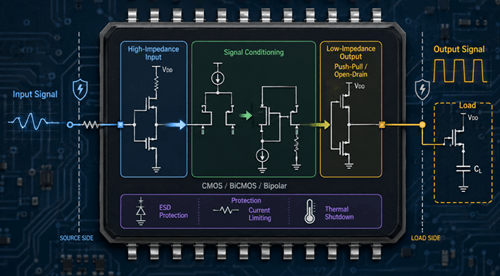
バッファ/ドライバーは入力信号を受け取り、出力時により高い強度、安定性、負荷駆動能力で再現することで動作します。デバイス内部では、トランジスタベースの段が必要な速度、電圧、電流に応じてCMOS、BiCMOS、またはバイポーラ技術で信号を処理します。入力側は通常高いインピーダンスを持ち、ソース回路からほとんど電流を引きません。これにより電圧降下を防ぎ、波形の歪みを減らし、元の信号を安定させます。
信号を受信した後、バッファ/ドライバはそれを条件付け、負荷を処理するための出力ステージに渡します。この出力段は通常低インピーダンスで、プッシュプル構造やオープンドレイン構造が用いられることがあります。プッシュプル出力は電流の供給と入力を行うことができ、ファンアウト、上昇時間、下降時間、スイッチング性能の向上が可能となります。より強力なドライバー回路では、出力段がMOSFETやIGBTゲートなどの容量性負荷に対して高いピーク電流を供給することも可能です。
バッファ/ドライバはまた、ソース回路を負荷から隔離するため、容量の変化、電流需要、電気的ノイズが元の信号を直接影響しません。多くの現代機器には、信頼性向上のためにESD保護、電流制限、熱遮断などの保護機能が含まれています。高速システムでは、伝搬遅延、上昇時間、下降時間に依存します。これらは信号が入力から出力へどれだけ速く正確に移動できるかを決定します。
バッファおよびドライバー回路の種類
異なるバッファおよびドライバー回路は、特定の電圧レベル、スイッチング速度、信号条件、負荷要求に応じて設計されています。一部はデジタル論理信号のクリーンニングと強化に使われ、他はバス、LED、モーター、パワートランジスタ、高速通信経路を駆動するために必要な電流を供給します。
| タイプ | 主な機能 | 典型的な使用方法 | 例示装置 |
|---|---|---|---|
| ロジックバッファ | デジタル論理信号を強化または隔離する | MCU出力、FPGAインターフェース、クロックライン、デジタルバス | 74HC125、74HC244、SN74LVCシリーズ |
| トライステートバッファ | HIGH、LOW、高インピーダンスの出力状態を追加 | 共有バス、メモリシステム、マイクロプロセッサインターフェース | 74HC125、74HC244 |
| バス運転手 | より大きなデジタルバスや複数の論理入力を駆動します | プロセッサバス、メモリインターフェース、FPGA信号ルーティング | 74LVC245, 74HC245 |
| レベルシフトバッファ | 異なる論理電圧間で信号を伝達 | 1.8V、3.3V、5V混合電圧システム | TXB/TXSシリーズ、SN74LVCシリーズ |
| ロードドライバー | 論理回路が高電流負荷を制御できるようにする | リレー、LED、ソレノイド、小型モーター | ULN2003、ULN2803 |
| ゲートドライバー | MOSFET、IGBT、GaN、またはSiC電源スイッチを駆動 | 電源、モータードライブ、インバーター、EVシステム | UCC27511、IR2110、アイソレーテッドゲートドライバー |
| 差動ドライバー | ノイズの多いまたは長距離リンクを通じて信号を送信 | RS-485、CAN、LVDS、イーサネット、産業用ネットワーク | MAX485、SN65HVDシリーズ |
デジタルロジックバッファ
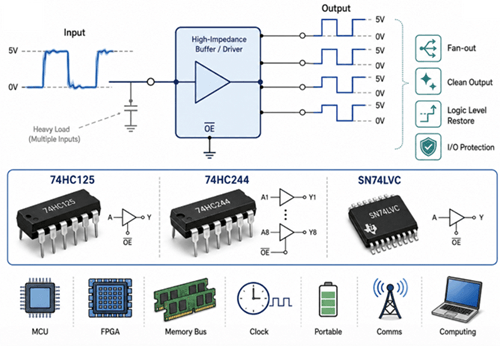
デジタルロジックバッファは入力信号を出力で再現しつつ、ソース回路への電気負荷を軽減します。1つのMCU、プロセッサ、またはFPGAピンが複数の論理入力、長いPCBトレース、クロックラインを駆動する必要がある場合に有用です。
論理バッファは有効な高電圧および低電圧レベルを維持し、ファンアウトを改善し、遅いエッジや不安定なスイッチングのリスクを低減します。現代の低電圧論理ファミリーは、1.8V、2.5V、または3.3Vの動作が必要なコンパクトなシステムでも有用です。
トライステートバッファとバスドライバー
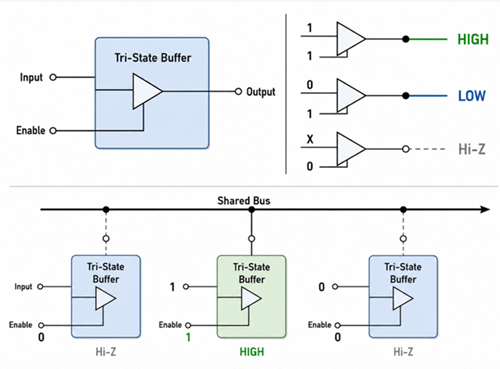
トライステートバッファは、論理HIGH、論理LOW、高インピーダンスの3つの出力状態を提供します。高インピーダンス状態はバスからの出力を切断し、複数のデバイスが互いに競合することなく同じ信号線を共有できるようにします。
バスドライバーは、信号が多くの入力を駆動したり、より広いデジタルバスを通過する必要がある場合に使用されます。これらは、信号強度やタイミングを安定させる必要があるメモリシステム、マイクロプロセッサインターフェース、FPGAボード、データラインなどで一般的です。
レベルシフトバッファ
レベルシフトバッファは、2つの回路が異なる論理電圧で動作する場合に使用されます。例えば、1.8Vセンサーが3.3VのMCUと通信したり、3.3Vコントローラーが5V周辺機器と接続したりする場合があります。
適切なレベルシフトがなければ、信号が受信機器の入力閾値に達しなかったり、高電圧側が低電圧回路を損傷させたりする可能性があります。レベルシフトバッファは、混合電圧デバイス間の安全かつ正確な論理通信を維持するのに役立ちます。
ロードドライバIC
ロードドライバーICは低消費電力の論理回路で高電流の負荷を制御することを可能にします。マイコンのピンはリレー、ソレノイド、高輝度LEDや小型モーターを直接駆動することはできません。なぜなら、これらの負荷はピンが安全に供給できる以上の電流を必要とするからです。
ULN2003やULN2803などのデバイスは、より高い負荷電流を処理するためにトランジスタドライバー段を使用します。これらはリレーボード、LED制御、ソレノイド駆動回路、ステッピングモーターの位相、そして単純な自動化システムに有用です。
バッファとドライバの一般的な応用
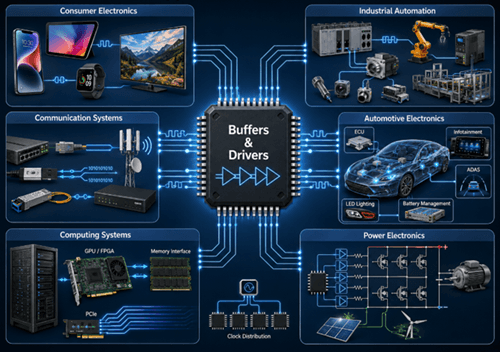
バッファやドライバーは、信号がより強力な駆動能力、より良い絶縁、よりクリーンなタイミング、または安全な負荷制御を必要とする場合に使用されます。用途によっては、信号速度、負荷電流、電圧レベル、ノイズ環境に応じて異なるドライバータイプを使用します。
| 適用地域 | 共通バッファまたはドライバータイプ | なぜ使われるのか |
|---|---|---|
| マイコンとGPIO回路 | 論理バッファ、レベルシフトバッファ | MCUピンの保護、ファンアウトの改善、そして異なる論理電圧レベル |
| FPGAとプロセッサインターフェース | ロジックバッファ、バスドライバー、クロックバッファ | 高速デジタル回線でのタイミング精度を維持し、負荷を軽減します。 |
| メモリおよびデータバス | トライステートバッファ、バスドライバー | 共有バス制御を可能にし、デバイス間の信号競合を防止します。 |
| 長いPCBトレースとケーブル | ラインドライバー、デファレンシャルドライバー | 信号を強化し、距離に比べてノイズ感度を低減します。 |
| RS-485、CAN、および産業用ネットワーク | 差動ドライバー、トランシーバー | ノイズ除去を改善し、過酷な環境下での信頼性の高い通信をサポートします。 |
| LEDとリレー制御 | ロードドライバー、トランジスタアレイ | 低消費電力の論理信号で高電流負荷を制御できる |
| MOSFETとIGBTスイッチング | ゲートドライバー | 高速スイッチングと低消費電力のためのピーク電流を提供します |
| モーター制御とパワーエレクトロニクス | モーター運転手、ゲート運転手 | 電流の流れ、スイッチング速度、トルク、保護機能を制御 |
| 自動車電子機器 | CANドライバー、ゲートドライバー、ロードドライバー | ノイズの多い環境、分散制御、高電流負荷をサポート |
| 電源とインバータ | MOSFET、IGBT、GaN、またはSiCゲートドライバー | スイッチング効率、熱性能、パワーステージ制御を向上させる |
通信および差動ドライバー
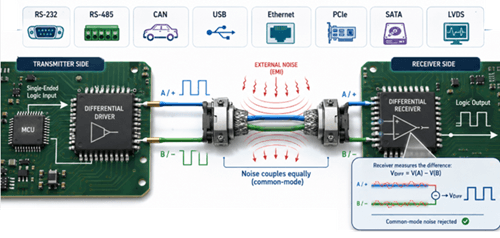
通信および差動ドライバーは、信号がケーブル、コネクター、長いPCBトレース、または電気的にノイズのある環境を通過する必要がある場合に使用されます。多くのシステムは、信号をグラウンド参照の1つの電圧として送る代わりに、差動信号を用い、受信側が2本の補完的な信号線間の電圧差を測定します。
この方法はノイズ除去を改善し、コモンモード干渉を低減し、長距離や高速での安定したデータ転送をサポートします。
なぜ差動ドライバーがコミュニケーションを改善するのか
シングルエンド信号では、接地基準や信号線上のノイズが受信電圧を直接乱すことがあります。差動信号では、外部ノイズが両線に似たような形で結合することがよくあります。受信機は2つの線の差を読み取るため、この一般的なノイズの多くは除去されます。このため、差動ドライバーは産業、自動車、コンピューティング、通信システムで広く使われています。
| インターフェース | 典型的なドライバータイプ | 主な利点 |
|---|---|---|
| RS-485 | 差動線ドライバー | 長距離かつ耐騒音の産業通信 |
| CAN | 差動トランシーバー | 堅牢な車両および産業用ネットワーク通信 |
| LVDS | 低電圧差動ドライバー | 高速・低ノイズのボードレベル信号 |
| USB | 差動信号駆動 | 信頼性の高いシリアルデータ転送 |
| イーサネット | 差動物理層信号 | 長距離ケーブル通信とネットワーク接続 |
| PCIe / SATA | 高速差動ドライバー | 高データレートと制御された信号完全性 |
バッファまたはドライバーICの選択方法
適切なバッファやドライバーICの選択は、信号源、負荷タイプ、電圧レベル、スイッチング速度、出力電流、PCB環境によって異なります。論理バッファは通常、信号の保護と強化に使われ、ドライバは回路がより重い負荷、長いトレース、ケーブル、MOSFETゲート、リレー、LED、またはモーターを制御する必要がある場合に使用されます。
適切なバッファまたはドライバーICの選択方法
| デザインニーズ | より良い選択 | チェックすべきこと |
|---|---|---|
| 1つの信号が複数の論理入力を駆動します | ロジックバッファ | ファンアウト、入力容量、出力電流 |
| 複数のデバイスが同じバスを共有しています | トライステートバッファ | 制御を有効化、高インピーダンス状態、バスの衝突リスク |
| MCUまたはFPGAは異なる電圧レベルに接続します | レベルシフトバッファ | 入出力電圧範囲、論理しきい値 |
| 信号は長いPCBトレースを通って伝わります | バス運転士または線路運転士 | 駆動強度、伝搬遅延、終端 |
| 信号はケーブルや騒音の多い環境を通過します | 差動ドライバー | RS-485、CAN、LVDS、防騒音性、ケーブル長 |
| ロジックピンはリレー、LED、またはソレノイド | ロードドライバー | 出力電流、クランプダイオード、熱放散 |
| PWM信号はMOSFETまたはIGBT | ゲートドライバー | ピーク電流、ゲート電圧、スイッチング速度 |
| 高速クロックやデータ信号にはクリーンタイミングが必要です | 高速バッファ | 歪み、ジッター、立ち下り時間、レイアウト品質 |
単純な論理信号の場合は、まず電圧互換性とファンアウトを確認してください。高電流または高速負荷の場合は、出力電流、熱定格、伝搬遅延、スイッチングエッジ速度、レイアウト要件を確認してください。
トラブルシューティング
| 共通の問題 | 原因 | 効果 | 解 |
|---|---|---|---|
| 信号リンギングと反射 | 終端不良またはインピーダンスの不一致 | 信号歪みと通信エラー | 適切な終端と制御インピーダンスルーティングを用いましょう |
| ドライバーの過熱 | 過剰な電流、冷却性能の不備、またはパッケージの定格不十分 | サーマルシャットダウンまたはデバイス故障 | 負荷電流を減らしたり、熱の放散を改善したり、より高定格のドライバーを選ぶ |
| タイミング誤差 | 過度な伝播遅延、歪み、またはルーティング不良 | 同期失敗とデータエラー | より高速なドライバーを使用し、トレース長を合わせ、ルーティングを最適化しましょう。 |
| ノイズとEMI | 接地不良、エッジレートの速さ、または弱いデカップリング | 信号の破損と干渉 | 接地、遮蔽、デカップリング、レイアウト分離の改善 |
よくある質問 [FAQ]
第1四半期。ファンアウトはバッファやドライバーの選択にどのような影響を与えますか?
高いファンアウトは負荷容量と電流需要を増加させます。論理バッファは、弱い論理レベルや遅いエッジ、タイミングの不安定性なしに、1つの信号が複数の入力を駆動するのに役立ちます。
Q2。標準バッファの代わりにトライステートバッファを使うべき場合?
複数のデバイスが同じバスを共有する場合は、トライステートバッファを使いましょう。高インピーダンス状態は出力を切断し、2つのデバイスが同時に線路を駆動するのを防ぎます。
Q3。なぜ長いトレースやケーブルにはしばしばラインドライバーや差動ドライバーが必要なのでしょうか?
長い信号経路は容量、ノイズピックアップ、インピーダンスの不一致、信号損失を増やします。ラインドライバーは信号を強化し、差動ドライバーは距離を越えたノイズ除去を改善します。
Q4。バッファやドライバーICを選ぶ際に最も重要なパラメータは何ですか?
電源電圧、論理閾値、出力電流、伝搬遅延、上昇/下降時間、出力構造、パッケージ定格、熱制限、保護機能を確認してください。
Q5。なぜ間違ったドライバーがオーバーヒートやタイミングの誤りを引き起こすのでしょうか?
電流不足、熱マージンの不足、または伝搬遅延が大きいドライバーは、過熱、スイッチングの速度が遅すぎ、エッジの歪み、または高速回路の同期エラーを引き起こすことがあります。










